Variable Clustered Fuzzy Rules for Self-Tuning Scheme for Respiratory Distresses by Similarity and the Phase Plane Trajectory Concept
*Corresponding Author(s):
Indrajit NaskarDepartment Of Applied Electronics And Instrumentation Engineering, Heritage Institute Of Technology, Kolkata, India
Email:Indrajit.naskar@heritageit.edu
Abstract
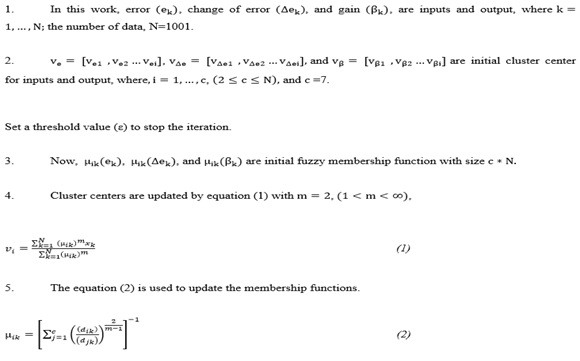
This work proposes a fuzzy rule extraction methodology for a self-tuning fuzzy controller based on the fuzzy clustering method (FCM) and the similarity approach technique. The similarity technique and phase plane trajectory method are used to even lower the acquired rules. To show a potential rule extraction scheme, the self-tuning fuzzy-logic-based proportional-derivative (STFLPDC) with 49 expert fuzzy rules and 49 clustered fuzzy gain rules is used. The utility of the approach is validated using common clustering validity indices. With 49 initial clustered fuzzy rules, the suggested method addressed oxygen supply in a human respiratory model. After further reduction using the similarity strategy, 29 and 14 fuzzy rules remained. Parallel to this, a real-time benchmark application using 49, 21, and 16 extracted fuzzy gain rules is used to access the performance of a lab-based overhead crane. Finally, to investigate control performance in both models, the phase plane trajectory concept is used to generate as few as 13 fuzzy gain rules.
Keywords
Fuzzy Clustering Method; Fuzzy Logic Based Proportional Plus Derivative Controller; Human Respiratory Model; Overhead Crane Model; Phase Plane Trajectory Method; Similarity Approach; Self-Tuning.
Introduction
The knowledge-based fuzzy logic design is a widely used method in engineering fields like process automation and control; and non-engineering fields like economics, prediction of human behavior, and others [1]. Rule development is an important component in fuzzy model the building process; it depends on skilled expertise [2,3] A data-driven simplified self-extracted and reduced rule-base method is demonstrated in this work in order to develop a through computation powerful and linguistically comprehensible fuzzy scheme for self-tuning fuzzy logic-based PD controllers (STFLPDCs), overcoming its dependence on the expert-based rule for the tuning process.
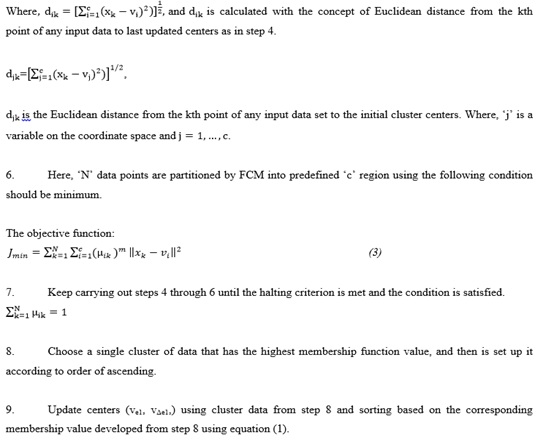
The Fuzzy C-Means (FCM) based clustering algorithm could be used to determine the membership values of the data points with the pre-defined number of clusters [4,5], and the similarity approach concept is applied to generate a meaningful fuzzy rule base from the cluster data that are logically overlapping [6-8]. The overlapped and similar rules were reduced by implementing the similarity approach with some pre-defined limiting conditions. The extracted rules are shrunk further through the phase plane trajectory approach, which states that rules are only accountable for error and the change of error to zero (tends to zero). The presented scheme is validated by partition coefficient (PE), partition entropy (PC), Xie and Beni (XB), etc. [9,10].
- Rule Extraction by FCM and Similarity Approach
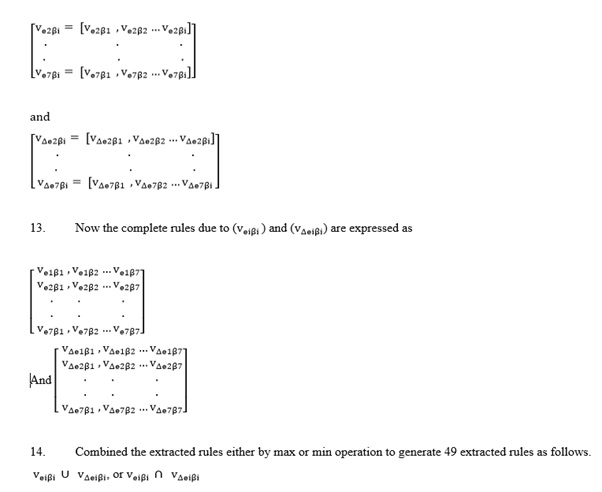
In expert rule base guidance for designing the self-tuning fuzzy controllers where the development of the fuzzy if-then rule is one of the critical tasks compared to other parts of the design under consideration. Any particular algorithm or standard method not yet established to extract some meaningful if-then rules from any processes [11,12]. Automatic efficient rule extraction and also rule reduction techniques (similarity and phase plane trajectory) are presented to extract fuzzy rules from the process data in order to address the issues of dependence on skilled professionals and the system in question itself. The developed human respiratory model and the crane model (Make: FEEDBACK, UK) are used to further examine the acquired fuzzy rule basis for STFLPDCs. The FCM algorithm initially clusters the data into seven specified fuzzy regions, after which (49) rules are extracted and also reduced to distinct numbers that correspond to the similarity analysis procedure. The phase plane trajectory approach further reduces these derived (49) rules to 13 rules. Algorithm: Extracting and reducing data-driven rules:
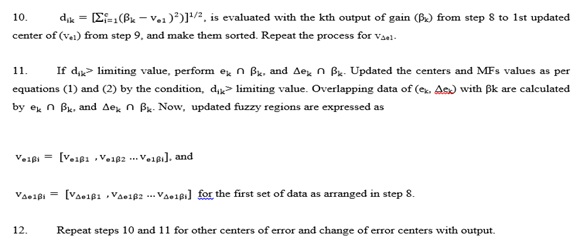
- The rules are automatically extracted to generate 29/14 rules for the respiratory and also 21/16 from the 49 extracted rules for the crane by simply altering the inter-cluster distance limiting criterion in the similarity approach and repeating steps 10 through 14.
- FCM Cluster Validity Check by Different Indices
The various validity indices are applied to judge the results of the selected clustering method that best fits the partitioning of the data [9,10,13] High compactness and low separation values are the ideal parameters to validate in the context of FCM.
Bezdek [10] derived the partition coefficient (VPC) and partition entropy (VPE),
 The high PC value is good (closer to unity) and the low value of PE to ‘0’ is better.
The high PC value is good (closer to unity) and the low value of PE to ‘0’ is better.
In Xie and Beni's [9] index VXB, a low value of VXB justifies good clustering.
 Silhouette Coefficient (SC), a high value (≤1) is a good indicator [13].
Silhouette Coefficient (SC), a high value (≤1) is a good indicator [13]. 
As per Dunn Index (DI) [13],

- Phase Plane Trajectory-Based Rule Reduction
The process response and its associated phase plane trajectory are shown in Fig. 1a-1b and Table 1, where the error (e) is zero at "b1" and "b3”, the change of error (Δe) is zero at "b2" and "b4", and both are zero at "c" [14,15]. By only selecting the rules where (e, Δe) are approaching zero, as illustrated in Table 2 and 3, the extracted 49 rules are then reduced to 13. Phase plane trajectory tracing for an overhead crane with the different rules are shown in Fig. 2, depicting stable and converged responses.
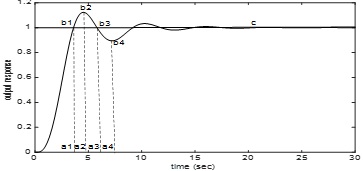 Figure 1a: Step response of the STFLPDC for Crane model
Figure 1a: Step response of the STFLPDC for Crane model
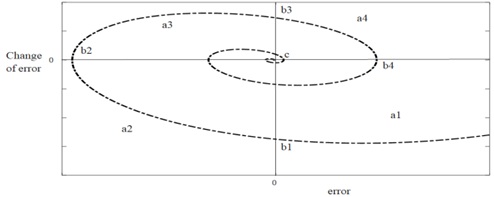 Figure 1b: The phase plane trajectory of the STFLPDC for Crane
Figure 1b: The phase plane trajectory of the STFLPDC for Crane
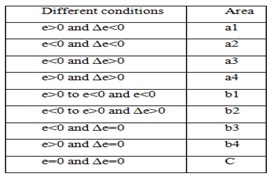 Table 1: Response area mapping with the trajectory
Table 1: Response area mapping with the trajectory
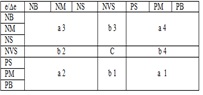 Table 2: Response area mapping with the trajectory plot
Table 2: Response area mapping with the trajectory plot
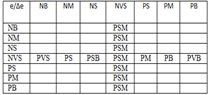 Table 3: Extracted 49 rules reduced to 13 rules by the phase plane trajectory
Table 3: Extracted 49 rules reduced to 13 rules by the phase plane trajectory
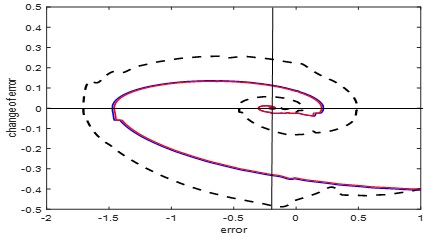 Figure 2: Phase Plane trajectory plot for inverted pendulum model 49 expert rules - - black, (49/21/16) extracted – blue, 13 rules by trajectory – red
Figure 2: Phase Plane trajectory plot for inverted pendulum model 49 expert rules - - black, (49/21/16) extracted – blue, 13 rules by trajectory – red
- Different Demonstrated Model
Human Respiratory Model
The different sections of the human respiratory system are the nasal cavity (TFN), trachea (TFT), bronchi (TFB), and alveoli (TFA) [16, 17]. The individual transfer functions are derived from the circuit diagram of Fig. 3 and with values presented in Table 4 as follows:
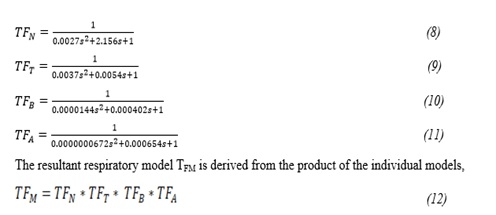
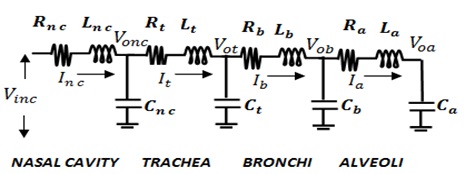 Figure 3: Electrical R, L, C model of the human respiratory system
Figure 3: Electrical R, L, C model of the human respiratory system
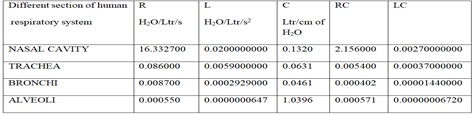 Table 4. Different values of R, L, and C in different sections of respiratory tract
Table 4. Different values of R, L, and C in different sections of respiratory tract
Validation of the Respiratory Model
The derived model is validated in real-time by spirometry test, and the model transfer function (TFR) as in equation (13) is derived using MATLAB System Identification Toolbox
 A comparison of TFR and TFM is presented in Fig. 4 [16-18].
A comparison of TFR and TFM is presented in Fig. 4 [16-18].
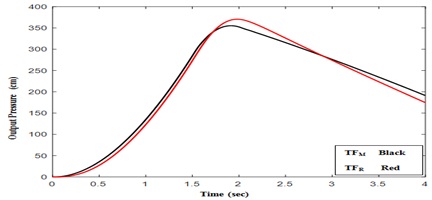 Figure 4: Comparison of the responses of the developed model and real model of respiratory system
Figure 4: Comparison of the responses of the developed model and real model of respiratory system
- Design of Proposed STFLPDC
STFLPDC for human respiratory model
Because of obstructions in the respiratory pathway caused by human respiratory disorders like Bronchitis and Emphysema, less air enters the lungs than is necessary for proper respiration to occur. The result in adverse effects that have already occurred must be properly treated medically, and supplementary oxygen must be given in addition to this medicine in order to restore regular breathing [16,17].
In this study, expert and extracted rule-base for STFLPDC are provided to supply desired quantity of controlled oxygen to the patient. The developed respiratory model is used to test with the input as seen in Fig. 5, and the outcomes of the proposed fuzzy model for STFLPDC using automatically extracted rules (49 rules), reduced extracted rules (29/14 rules), and 13 rules by trajectory approach are compared with expert knowledge-based 49 if-then rules.
The Input signal/ Normal breathing pattern
The breathing cycle in Fig. 5 lasts a total of 4 seconds, with t1 (inspiration time) equaling 1.5 seconds (0 ≤ t ≤ t1 ) and t2-t1 (expiration time) equaling 2.5 seconds (t1 < t ≤ t2).
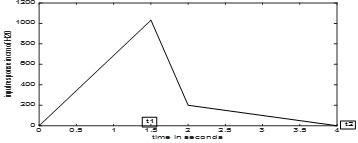
Figure 5: Normal breathing cycle
Oxygen cylinder with valve model
The oxygen supply model to the patient developed from the electrical analogy drawn in Fig. 6 as follows:
 According to the patient's oxygen needs, P1, P2, q, R, and C in Fig. 6 represent the input oxygen pressure, output oxygen pressure, oxygen flow rate, flow track resistance, and capacities of the system, respectively.
According to the patient's oxygen needs, P1, P2, q, R, and C in Fig. 6 represent the input oxygen pressure, output oxygen pressure, oxygen flow rate, flow track resistance, and capacities of the system, respectively.
The oxygen supply system's transfer function can be deduced as follows: 
To achieve the optimal fit value to build the TFcylinder model, the experiment is conducted with different set of R and C values and achieved the best result is at 0.25sec.
 Figure 6: Oxygen supply electrical analogy model.
Figure 6: Oxygen supply electrical analogy model.
Development of the proposed STFLPDC Scheme
The STFLPDC is designed with 49 fuzzy if-then rules and 49 fuzzy gain rules exhibited in Table 5, this scheme is proposed here to auto-tune the model appeared in Fig. 7. This scheme generates an additional automatic corrective gain signal ‘β’ at every instant, which coalesces with the FLPDC output ‘u’ and scaling factor ‘Gu’, to generate Gu*u*β to generate the tuned output for the required amount of O2 supply to the patient.
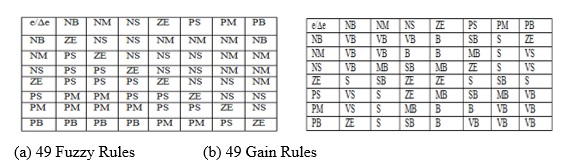 Table 5. Expert 49 rule matrix of FLPDC and 49 rule matrix of STFLPDC for respiratory model
Table 5. Expert 49 rule matrix of FLPDC and 49 rule matrix of STFLPDC for respiratory model
The automatic oxygen supply control scheme with STFLPDC for diseases like Bronchitis and Emphysema is depicted in Fig. 7.
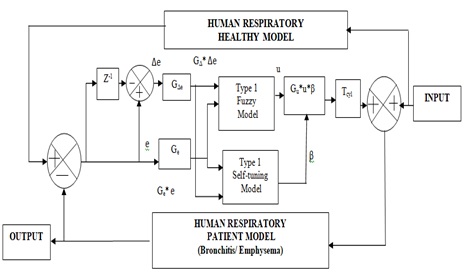 Figure 7: The proposed STFLPDC scheme
Figure 7: The proposed STFLPDC scheme
The extracted (49/29/14) fuzzy rules by similarity analysis are shown in Table 6-8 to build up the model of the self-tuning part of STFLPDC in the MATLAB Simulink environment. Another STFLPDC is designed by trajectory approach, where extracted 49 rules are reduced to 13 rules displayed in Table 3.
 Table 6. Extracted 49 rule matrix of STFLPDC developed respiratory model
Table 6. Extracted 49 rule matrix of STFLPDC developed respiratory model
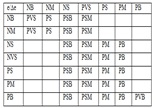 Table 7. Extracted 29 rule matrix of STFLPDC developed respiratory model
Table 7. Extracted 29 rule matrix of STFLPDC developed respiratory model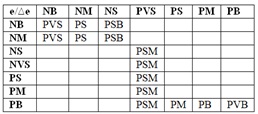 Table 8. Extracted 14 rule matrix of stflpdc for developed respiratory model
Table 8. Extracted 14 rule matrix of stflpdc for developed respiratory model
STFLPDC design for overhead crane
For the purpose of controlling an overhead crane, a dual control strategy employing a self-tuning PD technique is suggested [19,20], with one controlling position and the other controlling swing. To develop self-tuning FLPDC (STFLPDC), a span of ±1m and ±20° respectively for (e, ?e, and u/θ) are considered for FLPDC section and for self-tuning part, the span of β is selected from [0m, +1m] and [0° (0c), +20° (0.349c)] 49 gain rules using Table 9 for position and angle control, respectively, while keeping e, Δe the same as shown in Fig. 8 [21,22]. The gain rule base of STFLPDCs for position and angle controller are designed with 49/21/16 extracted gain rules in Table 10-12.
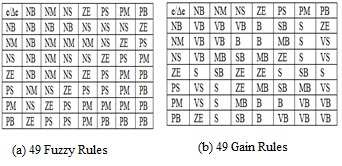 Table 9. Expert 49 rule matrix of FLPDC and 49 gain rule matrix of STFLPDC of crane model for position and angle control
Table 9. Expert 49 rule matrix of FLPDC and 49 gain rule matrix of STFLPDC of crane model for position and angle control
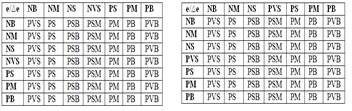 Table 10. Extracted 49 rule matrix of STFLPDC of crane model for position and angle control
Table 10. Extracted 49 rule matrix of STFLPDC of crane model for position and angle control
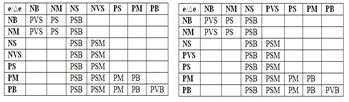 Table 11. Extracted 21 rule matrix of STFLPDC of crane model for position and angle control
Table 11. Extracted 21 rule matrix of STFLPDC of crane model for position and angle control
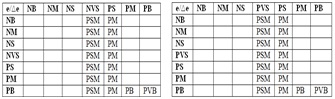 Table 12. Extracted 16 rule matrix of stflpdc for crane model for position and angle control
Table 12. Extracted 16 rule matrix of stflpdc for crane model for position and angle control
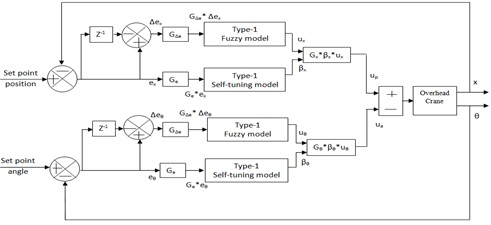 Figure 8: Block diagram of STFLPDC for overhead crane model
Figure 8: Block diagram of STFLPDC for overhead crane model
Convergent Test
The rules are extracted by using FCM and this is validated through different validity indices mentioned in section 3 and the results are presented in Table 13-14 below.
Cluster convergence test
The ratio M is expressed by the cost function
 The below Fig. 9a-9c illustrates the FCM-based clusters are significantly converged as for all ek, Δek, βk respectively.
The below Fig. 9a-9c illustrates the FCM-based clusters are significantly converged as for all ek, Δek, βk respectively.
 Table 13. Different validity index for respiratory model
Table 13. Different validity index for respiratory model
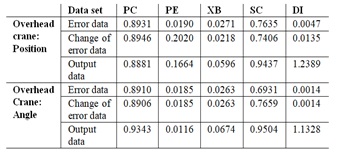 Table 14. Different validity index for crane model
Table 14. Different validity index for crane model
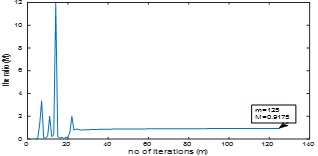 Fig. 9a. Convergence test of the FCM cluster for ek
Fig. 9a. Convergence test of the FCM cluster for ek
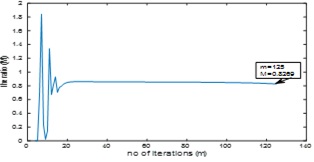 Fig. 9b. Convergence test of the FCM cluster for Δek
Fig. 9b. Convergence test of the FCM cluster for Δek
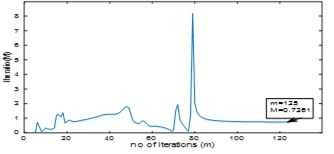 Fig. 9c. Convergence test of the FCM cluster for βk
Fig. 9c. Convergence test of the FCM cluster for βk
Comparative Result Analysis
STFLPDC for respiratory model
In this study, the usefulness of the constructed self-tuning model STFLPDC with modifications of extracted gain rules in two different ways (similarity and trajectory) is demonstrated on the respiratory distress due to respiratory diseases, namely, Bronchitis and Emphysema, and tested with different oxygen cylinder models. The oxygen cylinder model 1/ (1+0.5*S) shows the better result in diseases like Bronchitis and Emphysema exhibited in Fig.11 and Fig.14 respectively. Now the proposed STFLPDC scheme is designed with automatically extracted gain rules (49), and subsequent reduction of rules by 59.18% (29), 28.57% (14), and 26.5% (13). The performance analysis of these controllers in the Bronchitis and Emphysema model is demonstrated in Fig. 12 and Fig. 15. The efficiency of the designed controllers is compared. The comparison with other controllers is shown in Fig.10 and Fig. 13 for Bronchitis and Emphysema.
Bronchitis
The resistance of the bronchial section is increased by around 2000 times due to Bronchitis which impedes the O2 intake and also slows down the respiratory process and as a result the bronchial model is changed to TFB'.
 Emphysema
Emphysema
The capacitance of the alveoli is increased by more than 5000 times due to long-term smoking cause’s air to build up within these sacs for Emphysema [23,24]. The diseased alveoli model is modified to TFA'.

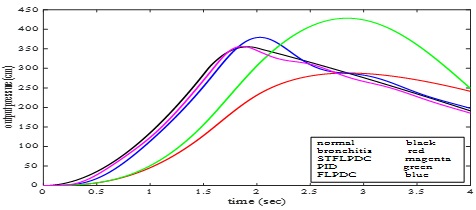 Figure 10: Study of different controllers on Bronchitis.
Figure 10: Study of different controllers on Bronchitis.
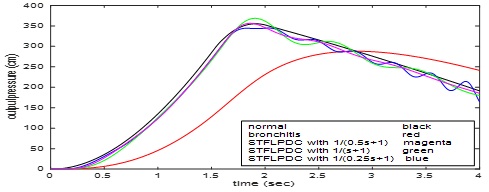 Figure 11: The effect of different combination of RC values for Bronchitis for the proposed STFLPDC
Figure 11: The effect of different combination of RC values for Bronchitis for the proposed STFLPDC
 Figure 12: The effect of Bronchitis due to different extracted rules
Figure 12: The effect of Bronchitis due to different extracted rules
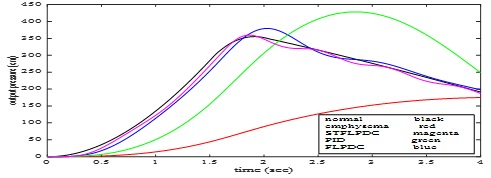 Figure 13: Study of different controllers on Emphysema
Figure 13: Study of different controllers on Emphysema
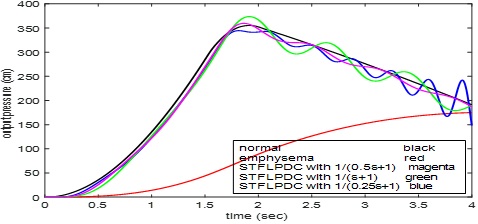 Figure 14: The effect of different combination of RC values for Emphysema for the proposed STFLPDC
Figure 14: The effect of different combination of RC values for Emphysema for the proposed STFLPDC
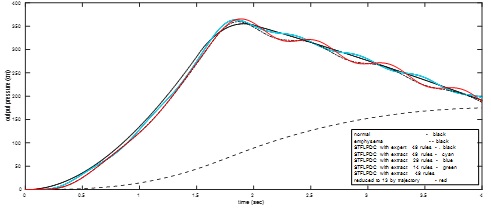 Figure 15: The effect of Emphysema due to different extracted rules
Figure 15: The effect of Emphysema due to different extracted rules
The response due to STFLPDC for the developed respiratory model is done by calculating the correlation coefficient (R) (towards +1 (but less than +1) is an indicator of goodness).
 Where, (dn, σn) and (ds, σs) are the data set and their standard deviation corresponds to the healthy patient model and responses due to different rules (expert, extracted, and trajectory) of proposed STFLPDC, FLPDC, and PID for respiratory model respectively. The effectiveness of the proposed controller for the respiratory models with extracted rules with the healthy patient for Bronchitis and Emphysema are presented by correlation coefficient and mean square error (MSE) as shown in Table 15-16.
Where, (dn, σn) and (ds, σs) are the data set and their standard deviation corresponds to the healthy patient model and responses due to different rules (expert, extracted, and trajectory) of proposed STFLPDC, FLPDC, and PID for respiratory model respectively. The effectiveness of the proposed controller for the respiratory models with extracted rules with the healthy patient for Bronchitis and Emphysema are presented by correlation coefficient and mean square error (MSE) as shown in Table 15-16.
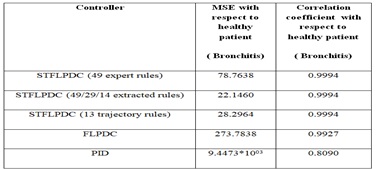 Table 15. Comparative study of different controllers for Bronchitis
Table 15. Comparative study of different controllers for Bronchitis
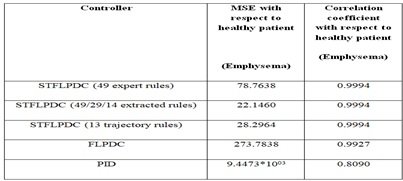 Table 16. Comparative study of different controllers for Emphysema
Table 16. Comparative study of different controllers for Emphysema
Real time application with STFLPDC for overhead crane model
Another STFLPDC [22] is designed with modifications of extracted gain rules Table 18-20 and Table 21 by two different ways (similarity and trajectory) and demonstrated on a laboratory-based overhead crane system (Make: FEEDBACK, UK).
Due to the coupling between position and angle control under any loading/unloading condition in the actual plant, crane control is a challenging task [15,19]. The study takes a standard nonlinear crane model (“19” and “20”) into consideration, and Table 17 displays the parameters used to design the overhead crane model as shown in Fig. 16 [25,26].
All the designed System responses show that the extraction and reduction (by both similarity and trajectory) of the rule base developed by both methods do not affect the system performance which ensures the success of the proposed rule extraction and reduction processes as shown in Fig. 10-20.

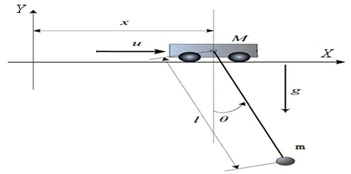 Figure 16: Pictorial view of the Overhead Crane
Figure 16: Pictorial view of the Overhead Crane
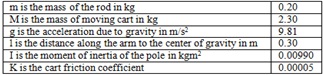 Table 17. Specification of overhead crane model
Table 17. Specification of overhead crane model
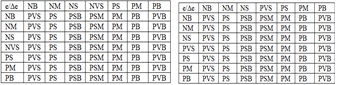 Table 18. Extracted 49 gain rules
Table 18. Extracted 49 gain rules
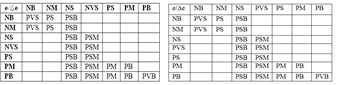 Table 19. Extracted 21 gain rules
Table 19. Extracted 21 gain rules
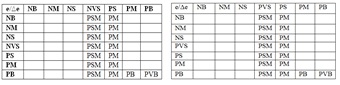 Table 20. Extracted 16 gain rules
Table 20. Extracted 16 gain rules
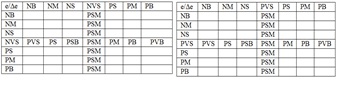 Table 21. Extracted 13 gain rules by trajectory approach
Table 21. Extracted 13 gain rules by trajectory approach
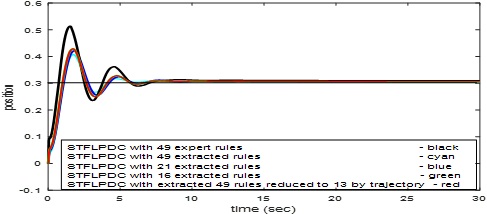 Figure 17: Study of STFLPDC (extracted 49/21/16 rules) to overhead crane position control and extracted 49 to13 rules by phase plane trajectory
Figure 17: Study of STFLPDC (extracted 49/21/16 rules) to overhead crane position control and extracted 49 to13 rules by phase plane trajectory
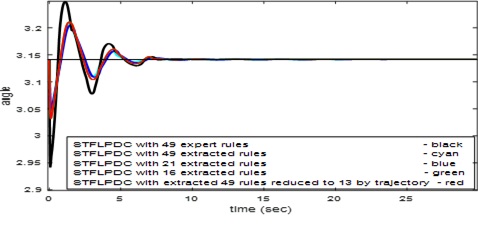 Figure 18: Study of STFLPDC (extracted 49/21/16 rules) for overhead crane angle control and extracted 49 to13 rules by phase plane trajectory
Figure 18: Study of STFLPDC (extracted 49/21/16 rules) for overhead crane angle control and extracted 49 to13 rules by phase plane trajectory
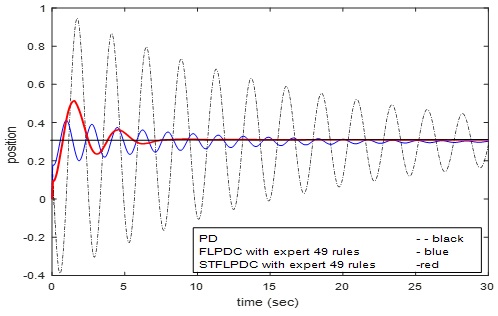 Figure 19: Study of different controllers for overhead crane position control
Figure 19: Study of different controllers for overhead crane position control
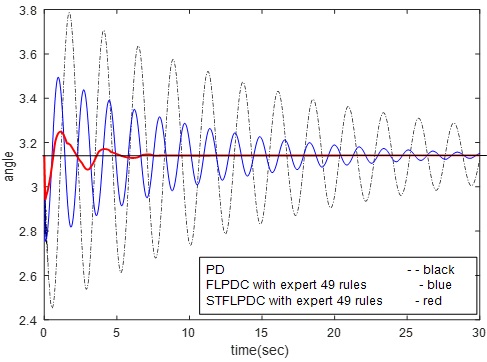 Figure 20: Study of different controllers for overhead crane angle control
Figure 20: Study of different controllers for overhead crane angle control
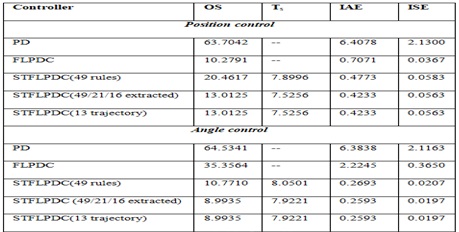 Table 22: Comparative study of different controllers for overhead crane
Table 22: Comparative study of different controllers for overhead crane
Conclusion
A straightforward and efficient framework for obtaining the necessary response is provided by the proposed automatic extracted rule for self-tuning based fuzzy controllers. For self-tuning controllers, the automatic extracted/reduced fuzzy if-then rules using FCM and similarity analysis, and these extracted rules additionally reduced by phase plane trajectory are computationally effective and comprehensible. The varied rule bases of the designed controllers were successfully tested on the various systems. Various validity indices assess the separation and compactness of the cluster. The multiplier of the self-tuning controllers is varied by tuning the controllers with various numbers of extracted/reduced gain rule bases. It is evident that the proposed rule-base extraction technique for controllers performs successfully when comparing the results obtained by applying various other control schemes to the respiratory model to control oxygen supply regulation, and to the overhead crane to control position and swing to get desired response. The developed model has been validated using a real human respiratory system by spirometry test, and it has an accuracy of up to 95.63%. The proposed controller (STFLPDC) with variable extracted rules for bronchitis and emphysema disease responds better than expert rules, according to the correlation coefficient and mean square error metric (MSE) and also for crane model by comparing different performance indices. Experimental validation results show that the established rules for the various STFLPDC schemes have acceptable accuracy and good interpretation features.
References
- Lee CC (1990) Fuzzy logic in control systems: fuzzy logic controller-Parts I, II. IEEE Trans. on System, Man, Cybern 20: 404-435.
- Setnes M, Babuska R, Kaymak U, Lemke HRN (1998) Similarity measures in fuzzy rule base simplification. IEEE Trans. SMC-B 28: 376-386.
- Wang L, Mendel JM (1992) Generating fuzzy rules by learning from examples. IEEE Trans. on System, Man, Cybern. 22: 1414-1427.
- Dutu LC, Mauris G, Bolon P (2018) A fast and accurate rule-base generation method for Mamdani fuzzy systems. IEEE Trans. Fuzzy System 26: 715-733.
- Kóczy LT,Botzheim J, Ruano AB, Chong A, Gedeon TD (2004) Fuzzy rule extraction from input/output data. Advances in Fuzzy Systems Applications and Theory. Machine Intelligence: 199-216.
- Tarbosh, Qazwan A, Aydo?du Ö, Farah N, Salh A, et al. (2020) Review and investigation of simplified rules fuzzy logic speed controller of high performance induction motor drives. IEEE digital object identifier.
- Mohammed HR, Hussain ZM (2021) Hybrid Mamdani Fuzzy Rules and Convolutional Neural Networks for Analysis and Identification of Animal Images. Computation 9: 35.
- Zhou X, Tan, Ding YZ, Liu Y (2021) Selecting Correct Methods to Extract Fuzzy Rules from Artificial Neural Network. Mathematics 9: 1164.
- Hu YH, Zeo YC, Yang, Qu F, (2011) A Cluster Validity Index for Fuzzy C-Means Clustering. International Conference on System Science, Engineering Design and Manufacturing Information 263-266.
- Bezdek JC (1974) Cluster validity with fuzzy sets. J Cybernet 3: 58-72.
- Mkhitaryan S, Wozniak MK, Giabbanelli P, Nápoles G, Vries De N, et al. (2022) FCMpy: a python module for constructing and analyzing fuzzy cognitive maps. Peer J Comput Sci 8:e1078.
- Mohammed Al-Shammaa, and Maysam F Abbod (2022) Automatic Generation of Fuzzy Classification Rules from Data. Int J of Fuzzy Systems and Adv Appl 9: 63-68.
- Mar?a J, Romera L, Ballesteros M del MM, Gutierrez JG, Santos, JCR (2016) An Approach to Silhouette and Dunn Clustering Indices Applied to Big Data in Spark. Springer International Publishing Switzerland 2016, O. Luaces et al. (Eds.) pp 160-169.
- Srikanth NV, Kumar DV (2004) Investigation of stability of fuzzy logic based power system stabilizers using phase-plane analysis. In Proc. Nat. Power Syst 408-413.
- Park MS, Chwa D, Hong SK (2008) Antisway tracking control of overhead cranes with system uncertainties and actuator nonlinearity using an adaptive fuzzy sliding mode controls. IEEE Trans. on Industrial Electronics V-55: 3972-3984.
- Naskar I, Pal AK, Jana NK (2023) Self-Regulating Adaptive Controller for Oxygen Support to Severe Respiratory Distress Patients and Human Respiratory System Modeling. MDPI-Diagnostics13: 967.
- Naskar I, Pal AK (2022) Self Adaptive Fuzzy Controller for Supplementary Oxygen Supply to the Respiratory Distress Patients. J of Scient Research 14: 843-860.
- Sharp JT, Henry Meadows JP, Sweany SK, Pietras RJ (1964) Total Respiratory Inertance and It's Gas and Tissue Components in Normal and Obese Men. Journal of Clinical Investigation, V43: 503-509.
- Sorensen KL, Singhose W, Dickerson S (2007) A controller enabling precise positioning and sway reduction in bridge and grany crane. Control Engineering Practice 15: 825-837.
- Pal AK, Mudi RK (2012) An adaptive fuzzy controller for an overhead crane. IEEE International Conference on Advanced Communication Control and Computing Technologies (ICACCCT) 300-304.
- Mudi RK, Pal NR, (1998) A self-tuning fuzzy PD controller. IETE Journal of Research Special Issue on Fuzzy Systems 44: 177-189.
- Pal AK, Mudi RK, Maity RR De (2013) A non-fuzzy self-tuning scheme of PD-type FLC for an overhead crane Control. Advances in Intelligent Systems and Computing 199: 35-42.
- Sethi S (1999) Infectious exacerbations of chronic bronchitis: diagnosis and management. Journal of Antimicrobial Chemotherapy 43: 97-105.
- M El Garhy A, Ibrahim El Adawy M, Sawfta FO (2012) Design of fuzzy controller for supplying oxygen in sub-acute respiratory illnesses. International Journal of Computer Science Issues 9: 192-206.
- Pal AK, Mudi RK, Dey C (2012) Rule Extraction through Self-Organizing Map for a Self-Tuning Fuzzy Logic Controller. Advanced Materials Research 403: 4957-4964.
- Naskar I, Pal AK, (2018) Type-2 Fuzzy Controller with Type-1 Tuning Scheme for Overhead Crane Control. Computational Intelligence, Communications, and Business Analytics 776: 567-576.
Citation: Naskar I, Pal AK, Jana NK (2023) Variable Clustered Fuzzy Rules for Self-Tuning Scheme for Respiratory Distresses by Similarity and the Phase Plane Trajectory Concept. J Pulm Med Respir Res 9: 079.
Copyright: © 2023 Indrajit Naskar, et al. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.